東京大学生産技術研究所が開発した自立型海中ロボット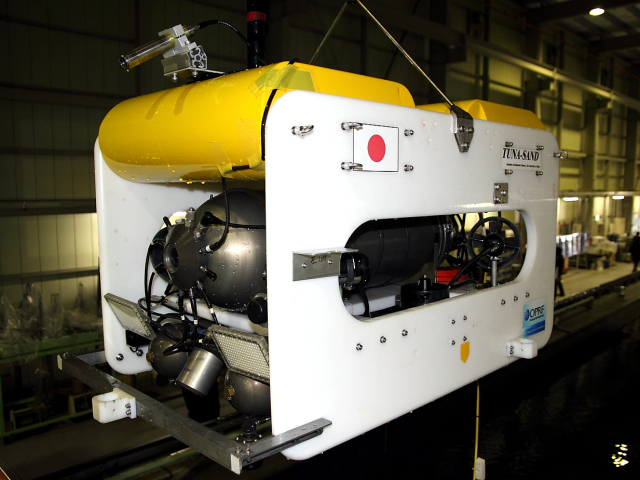
韓国の大型旅客船「セウォル号」が沈没した事件で、行方不明者を捜索するためダイバーが船内に入ったが、障害物が多く、視界も20センチしかないので何もできずに帰って来たという。水が濁って視界が20センチしか無いんじゃ、人間による探索は困難だろう。そんなとき、マイクロマウス大会に参加するロボットのように、壁との距離を超音波で計測し、迷路構造をマッピングしながらルートを探索することができる海中用のロボットがいたらいいのにと思う。
しかも小さくて、ダイバーが入れないような小さな隙間から船内に入り込み、互いに近距離通信しあうことでネットワークを確保し、人間よりもずっと短時間で安全に船内の探索を終わらせることができるんじゃないだろうか。遭難者を運ぶのは無理かもしれないが、位置を特定し、指示を与え、食料や飲料水や防寒具を配り、携帯電話の通信を可能にするだけでも、かなりの人命を救えるだろう。
ちょっと調べてみたが、東大のTSUNA-SANDという自立型の海底ロボットは、1500メートルも潜れて、すでに鉱床見つけたり実績も出しているらしい。
まぁ、これは海底探索専用のようだし、船内に送り込むには大きすぎるが、日本のロボット技術を結集すれば、充分に実現できるんじゃないだろうか。
そんな救助ロボットを多数、船内に配備しておくことができたら、大惨事にはならなかったかもしれないと思うと、なんとも辛い気持ちになる。